电子信息学院机器人与智能技术研究团队题为“WatNet: A High-Precision Water Body Extraction Method in Remote Sensing Images under Complex Backgrounds”的学术研究论文在遥感领域期刊《Journal of Applied Remote Sensing》(中科院4区)正式发表。该研究成果以上海电机学院为第一单位,,浙江大学为第二单位,作者为杨倩倩(在读研究生)、饶蕾老师(通讯)、范光宇老师、陈年生老师、程松林老师、宋晓勇老师和杨定裕老师。
在复杂背景下的航空遥感图像水体提取是环境监测、灾害管理和城市规划中的重要任务。尽管现有的遥感图像水体提取算法为水体监测提供了有力的工具,但在诸如植被遮盖、地形变化或云层干扰等复杂背景下仍存在无法提取细小水体、水体边缘缺失等问题。基于此,本文提出了一种名为WatNet的架构,以提升复杂环境下的水体提取精度。WatNet主要包括三个模块:Global Multi-Attention Fusion Module(GMAF)、Water Forward Network Module(WFN)和Edge Focus Attention Module(EFA)。GMAF模块通过多头自注意力和卷积注意力模块增强模型的全局信息获取能力,以提升水体整体特征提取效果。WFN模块结合深度可分离卷积和注意力机制以提高细小水体局部特征的捕捉能力。EFA模块通过精细化边缘检测,显著提高了水体边界的清晰度和准确性。
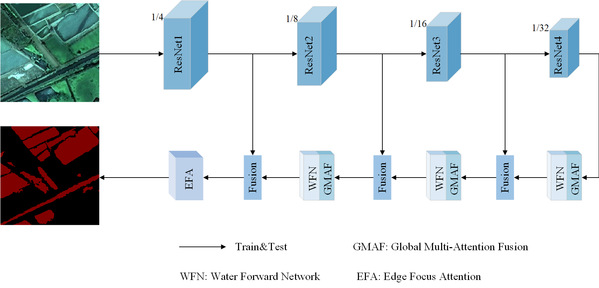
模型结构图
在LoveDA和、QTPL和WHDLD数据集上的实验显示,WatNet在整体准确率(OA)、F1分数和平均交并比(mIoU)方面均优于当前主流的方法。在LoveDA数据集上,WatNet的mIoU相较于次优方法提高了1.24%,在QTPL数据集上提高了0.4%,在WHDLD数据集上提高了0.52%。这些结果验证了WatNet在处理不同环境下水体提取任务时的有效性和鲁棒性。本研究成果可广泛应用于环境保护、城市规划、洪水控制和减灾等领域。
机器人与智能技术研究团队由1名教授、2名副教授、1名高级实验师、22名在读研究生以及9名合作企业导师组成。团队的研究方向主要涵盖智能感知与控制技术、移动机器人导航技术、无线网络优化和机器学习以及特定场景下的语音识别技术。团队承担着国家自然科学基金项目、上海市闵行区科委产学研项目、上海高校选拔培养优秀青年教师科研专项基金项目以及20多项企业委托科研项目。在《IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing》《IEEE Robotics and Automation Letters》《IEEE Transactions on Vehicular Technology》《机器人》等国内外学术期刊和会议上发表30多篇论文,并获得多项国家授权发明专利。(供稿:电子信息学院 在读研究生杨倩倩)
